Sampling from QUBO with OMMX Adapter#
Here, we explain how to convert a problem to QUBO and perform sampling using the Traveling Salesman Problem as an example.

The Traveling Salesman Problem (TSP) is about finding a route for a salesman to visit multiple cities in sequence. Given the travel costs between cities, we seek to find the path that minimizes the total cost. Let’s consider the following city arrangement:
# From ulysses16.tsp in TSPLIB
ulysses16_points = [
(38.24, 20.42),
(39.57, 26.15),
(40.56, 25.32),
(36.26, 23.12),
(33.48, 10.54),
(37.56, 12.19),
(38.42, 13.11),
(37.52, 20.44),
(41.23, 9.10),
(41.17, 13.05),
(36.08, -5.21),
(38.47, 15.13),
(38.15, 15.35),
(37.51, 15.17),
(35.49, 14.32),
(39.36, 19.56),
]
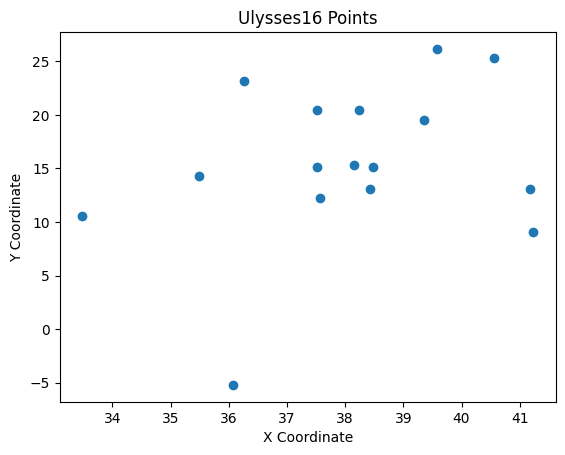
Let’s plot the locations of the cities.
%matplotlib inline
from matplotlib import pyplot as plt
x_coords, y_coords = zip(*ulysses16_points)
plt.scatter(x_coords, y_coords)
plt.xlabel('X Coordinate')
plt.ylabel('Y Coordinate')
plt.title('Ulysses16 Points')
plt.show()
Let’s consider distance as the cost. We’ll calculate the distance \(d(i, j)\) between city \(i\) and city \(j\).
def distance(x, y):
return ((x[0] - y[0])**2 + (x[1] - y[1])**2)**0.5
# Number of cities
N = len(ulysses16_points)
# Distance between each pair of cities
d = [[distance(ulysses16_points[i], ulysses16_points[j]) for i in range(N)] for j in range(N)]
Using this, we can formulate TSP as follows. First, let’s represent whether we are at city \(i\) at time \(t\) with a binary variable \(x_{t, i}\). Then, we seek \(x_{t, i}\) that satisfies the following constraints. The distance traveled by the salesman is given by:
However, \(x_{t, i}\) cannot be chosen freely and must satisfy two constraints: at each time \(t\), the salesman can only be in one city, and each city must be visited exactly once:
Combining these, TSP can be formulated as a constrained optimization problem:
The corresponding ommx.v1.Instance can be created as follows:
from ommx.v1 import DecisionVariable, Instance
x = [[
DecisionVariable.binary(
i + N * t, # Decision variable ID
name="x", # Name of the decision variable, used when extracting solutions
subscripts=[t, i]) # Subscripts of the decision variable, used when extracting solutions
for i in range(N)
]
for t in range(N)
]
objective = sum(
d[i][j] * x[t][i] * x[(t+1) % N][j]
for i in range(N)
for j in range(N)
for t in range(N)
)
place_constraint = [
(sum(x[t][i] for i in range(N)) == 1)
.set_id(t) # type: ignore
.add_name("place")
.add_subscripts([t])
for t in range(N)
]
time_constraint = [
(sum(x[t][i] for t in range(N)) == 1)
.set_id(i + N) # type: ignore
.add_name("time")
.add_subscripts([i])
for i in range(N)
]
instance = Instance.from_components(
decision_variables=[x[t][i] for i in range(N) for t in range(N)],
objective=objective,
constraints=place_constraint + time_constraint,
sense=Instance.MINIMIZE
)
The variable names and subscripts added to DecisionVariable.binary during creation will be used later when interpreting the obtained samples.
Sampling with OpenJij#
To sample the QUBO described by ommx.v1.Instance using OpenJij, use the ommx-openjij-adapter.
from ommx_openjij_adapter import OMMXOpenJijSAAdapter
sample_set = OMMXOpenJijSAAdapter.sample(instance, num_reads=16, uniform_penalty_weight=20.0)
sample_set.summary
| objective | feasible | |
|---|---|---|
| sample_id | ||
| 3 | 107.480052 | True |
| 9 | 112.741543 | True |
| 12 | 125.389588 | True |
| 7 | 133.911070 | True |
| 1 | 135.198726 | True |
| 0 | 146.369779 | True |
| 4 | 146.369779 | True |
| 14 | 146.369779 | True |
| 6 | 147.466946 | True |
| 11 | 151.000802 | True |
| 13 | 152.196050 | True |
| 10 | 155.875424 | True |
| 15 | 155.875424 | True |
| 8 | 134.854582 | False |
| 5 | 148.964495 | False |
| 2 | 152.186358 | False |
OMMXOpenJijSAAdapter.sample returns ommx.v1.SampleSet, which stores the evaluated objective function values and constraint violations in addition to the decision variable values of samples. The SampleSet.summary property is used to display summary information. feasible indicates the feasibility to the original problem before conversion to QUBO. This is calculated using the information stored in removed_constraints of the qubo instance.
To view the feasibility for each constraint, use the summary_with_constraints property.
sample_set.summary_with_constraints
| objective | feasible | place[0] | place[1] | place[2] | place[3] | place[4] | place[5] | place[6] | place[7] | ... | time[6] | time[7] | time[8] | time[9] | time[10] | time[11] | time[12] | time[13] | time[14] | time[15] | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| sample_id | |||||||||||||||||||||
| 3 | 107.480052 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 9 | 112.741543 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 12 | 125.389588 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 7 | 133.911070 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 1 | 135.198726 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 0 | 146.369779 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 4 | 146.369779 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 14 | 146.369779 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 6 | 147.466946 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 11 | 151.000802 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 13 | 152.196050 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 10 | 155.875424 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 15 | 155.875424 | True | True | True | True | True | True | True | True | True | ... | True | True | True | True | True | True | True | True | True | True |
| 8 | 134.854582 | False | True | True | True | True | True | True | True | True | ... | True | True | True | True | False | True | True | True | True | True |
| 5 | 148.964495 | False | True | True | True | True | True | True | True | True | ... | True | True | True | True | False | True | True | True | True | True |
| 2 | 152.186358 | False | True | True | True | True | True | True | True | True | ... | True | True | True | True | False | True | True | True | True | True |
16 rows × 34 columns
For more detailed information, you can use the SampleSet.decision_variables and SampleSet.constraints properties.
sample_set.decision_variables_df.head(2)
| kind | lower | upper | name | subscripts | description | 0 | 1 | 2 | 3 | ... | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| id | |||||||||||||||||||||
| 0 | Binary | 0.0 | 1.0 | x | [0, 0] | None | 0.0 | 0.0 | 0.0 | 0.0 | ... | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| 1 | Binary | 0.0 | 1.0 | x | [0, 1] | None | 0.0 | 0.0 | 0.0 | 0.0 | ... | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
2 rows × 22 columns
sample_set.constraints_df.head(2)
| equality | used_ids | name | subscripts | description | removed_reason | value.0 | value.1 | value.2 | value.3 | ... | feasible.6 | feasible.7 | feasible.8 | feasible.9 | feasible.10 | feasible.11 | feasible.12 | feasible.13 | feasible.14 | feasible.15 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| id | |||||||||||||||||||||
| 0 | =0 | {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13,... | place | [0] | None | uniform_penalty_method | 0.0 | 0.0 | 0.0 | 0.0 | ... | True | True | True | True | True | True | True | True | True | True |
| 1 | =0 | {16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 2... | place | [1] | None | uniform_penalty_method | 0.0 | 0.0 | 0.0 | 0.0 | ... | True | True | True | True | True | True | True | True | True | True |
2 rows × 38 columns
To obtain the samples, use the SampleSet.extract_decision_variables method. This interprets the samples using the name and subscripts registered when creating ommx.v1.DecisionVariables. For example, to get the value of the decision variable named x with sample_id=1, use the following to obtain it in the form of dict[subscripts, value].
sample_id = 1
x = sample_set.extract_decision_variables("x", sample_id)
t = 2
i = 3
x[(t, i)]
0.0
Since we obtained a sample for \(x_{t, i}\), we convert this into a TSP path. This depends on the formulation used, so you need to write the processing yourself.
def sample_to_path(sample: dict[tuple[int, ...], float]) -> list[int]:
path = []
for t in range(N):
for i in range(N):
if sample[(t, i)] == 1:
path.append(i)
return path
Let’s display this. First, we obtain the IDs of samples that are feasible for the original problem.
feasible_ids = sample_set.summary.query("feasible == True").index
feasible_ids
Index([3, 9, 12, 7, 1, 0, 4, 14, 6, 11, 13, 10, 15], dtype='int64', name='sample_id')
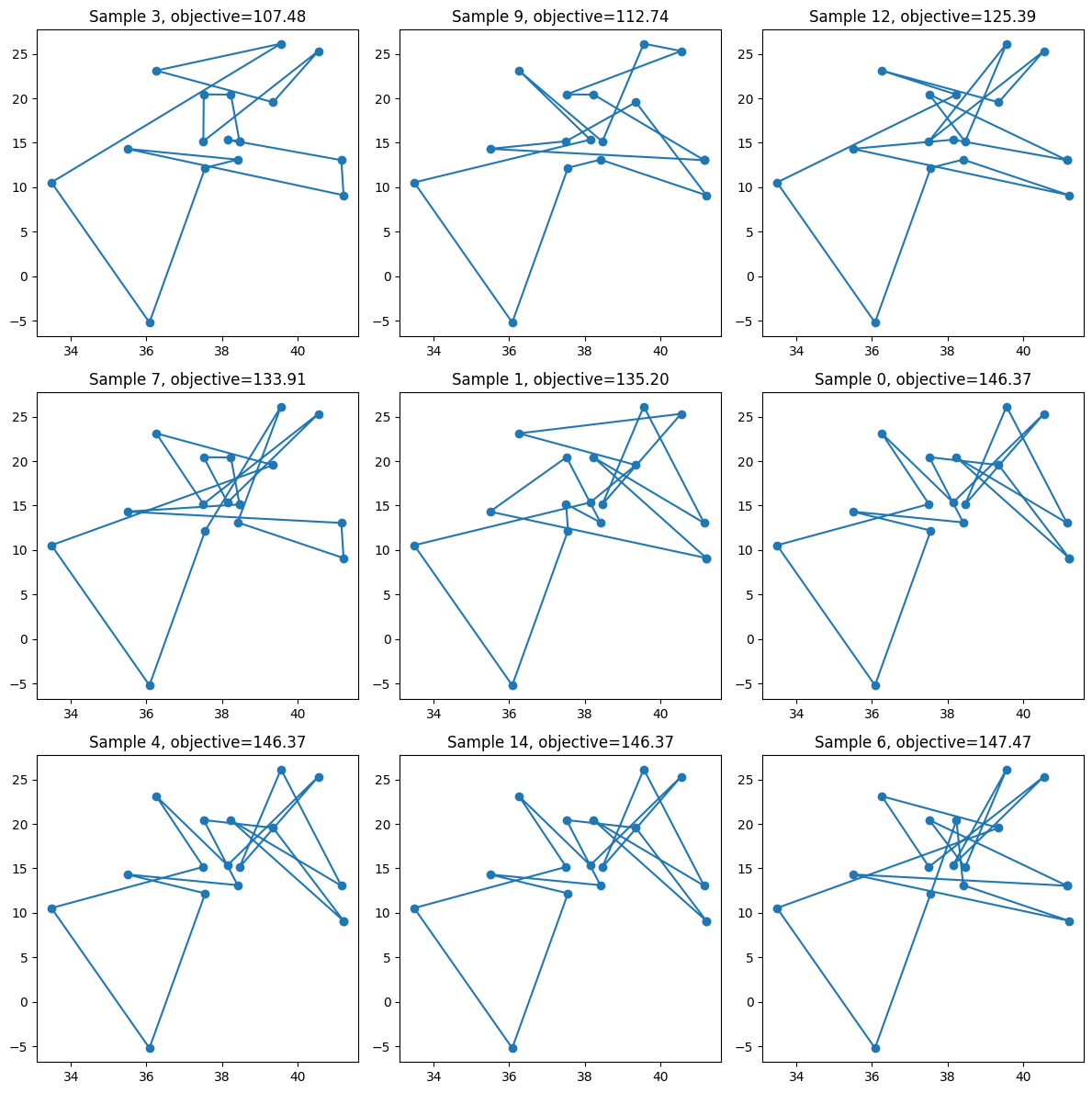
Let’s display the optimized paths for these samples.
fig, axie = plt.subplots(3, 3, figsize=(12, 12))
for i, ax in enumerate(axie.flatten()):
if i >= len(feasible_ids):
break
s = feasible_ids[i]
x = sample_set.extract_decision_variables("x", s)
path = sample_to_path(x)
xs = [ulysses16_points[i][0] for i in path] + [ulysses16_points[path[0]][0]]
ys = [ulysses16_points[i][1] for i in path] + [ulysses16_points[path[0]][1]]
ax.plot(xs, ys, marker='o')
ax.set_title(f"Sample {s}, objective={sample_set.objectives[s]:.2f}")
plt.tight_layout()
plt.show()